
PROJECT SERENGETI: PIONEERING DRONE AUTOMATION THROUGH DIGITAL TWINS
PROJECT SERENGETI: PIONEERING DRONE AUTOMATION THROUGH DIGITAL TWINS
In an era characterized by innovative technological breakthroughs and the continuous evolution of aviation, unmanned aerial vehicles, especially drones, are increasingly coming into focus. These small aircraft have the potential not only to revolutionize the way we see the world, but also to provide crucial solutions to challenges in various sectors.
The SERENGETI project (simulation-based automation of drone flights using a digital twin) further develops a virtual twin for drone flights that creates exact copies of the flight conditions and environment for each drone flight.
The goal is to improve automation in drone operations in order to use drones more efficiently for a variety of applications in areas such as:
In an era characterized by innovative technological breakthroughs and the continuous evolution of aviation, unmanned aerial vehicles, especially drones, are increasingly coming into focus. These small aircraft have the potential not only to revolutionize the way we see the world, but also to provide crucial solutions to challenges in various sectors.
The SERENGETI project (simulation-based automation of drone flights using a digital twin) further develops a virtual twin for drone flights that creates exact copies of the flight conditions and environment for each drone flight.
The goal is to improve automation in drone operations in order to use drones more efficiently for a variety of applications in areas such as:
agriculture
rescue services
police work
logistics
agriculture
rescue services
police work
logistics
Modern advances already enable autonomous take-off, flight and landing, but full automation requires the transfer of pilot knowledge and safety concepts into the software.
The EU Drone Strategy 2.0 emphasizes the need for automated flight operation systems. The Invest BW project SIMBA has already laid the foundations, including an advanced 4D trajectory calculation and a generic flight performance model for multicopter drones in collaboration with Matternet.
With SERENGETI, Unisphere is responding to the need for more automation and developing a key technology for the growth of the unmanned aviation market. SERENGETI builds on the successes of SIMBA and aims to create a comprehensive digital twin for drone flights in order to intensify automation in drone operations and open up new economic and sustainable fields of application.
Modern advances already enable autonomous take-off, flight and landing, but full automation requires the transfer of pilot knowledge and safety concepts into the software.
The EU Drone Strategy 2.0 emphasizes the need for automated flight operation systems. The Invest BW project SIMBA has already laid the foundations, including an advanced 4D trajectory calculation and a generic flight performance model for multicopter drones in collaboration with Matternet.
With SERENGETI, Unisphere is responding to the need for more automation and developing a key technology for the growth of the unmanned aviation market.
SERENGETI builds on the successes of SIMBA and aims to create a comprehensive digital twin for drone flights in order to intensify automation in drone operations and open up new economic and sustainable fields of application.
Mitigating Risks and Advancing Safety
Mitigating Risks and Advancing Safety
The intended development involves various technological and economic risks that illustrate the need for funding for the project:
The intended development involves various technological and economic risks that illustrate the need for funding for the project:
● Digital twin
A complete digital twin that integrates all relevant flight data in a 4D trajectory simulation lacks formal declarations and/or imperative methods. The combination of both methods for mapping complex situations requires development effort and involves economic risks.
● Obstacle database
Precise information on buildings is crucial for drone flights in urban areas in order to avoid collisions and take into account the influence of buildings on the weather. As digital building information is not available across the board, flexible route changes and dynamic flight planning are currently not possible.
● Precision flight performance model fixed-wing drone:
Multicopters and fixed-wing drones generate lift in different ways. Multicopters use vertically arranged rotors, similar to a helicopter, while fixed-wing drones generate lift in forward flight like normal airplanes with a fixed wing. A generic flight performance model for multicopters was developed in the Invest BW SIMBA project. In order to achieve the same accuracy for fixed-wing drones, the model must be extended to include their characteristic features.
● Digital twin
A complete digital twin that integrates all relevant flight data in a 4D trajectory simulation lacks formal declarations and/or imperative methods. The combination of both methods for mapping complex situations requires development effort and involves economic risks.
● Obstacle database
Precise information on buildings is crucial for drone flights in urban areas in order to avoid collisions and take into account the influence of buildings on the weather. As digital building information is not available across the board, flexible route changes and dynamic flight planning are currently not possible.
● Precision flight performance model fixed-wing drone:
Multicopters and fixed-wing drones generate lift in different ways. Multicopters use vertically arranged rotors, similar to a helicopter, while fixed-wing drones generate lift in forward flight like normal airplanes with a fixed wing. A generic flight performance model for multicopters was developed in the Invest BW SIMBA project. In order to achieve the same accuracy for fixed-wing drones, the model must be extended to include their characteristic features.
In order to have Unisphere’s Operations and Weather Management Platform NOVA approved by the European Aviation Safety Agency (EASA) in the future, it is crucial to systematically validate the digital twin of a drone flight and the pilot knowledge represented in the algorithms using real flight data. This validation requires consistent data integrity both in the simulation and in the generation of the flight data.
In order to have Unisphere’s Operations and Weather Management Platform NOVA approved by the European Aviation Safety Agency (EASA) in the future, it is crucial to systematically validate the digital twin of a drone flight and the pilot knowledge represented in the algorithms using real flight data.
This validation requires consistent data integrity both in the simulation and in the generation of the flight data.
Work Objectives and Solution Approaches
Work Objectives and Solution Approaches
The digital twin will be validated in flight tests and further developed according to the technological maturity levels in order to ultimately be integrated into Unisphere’s Platform NOVA.
The aim is to launch the finished product on the market as a minimum viable product (MVP) that can already be used by pilot customers.
The digital twin will be validated in flight tests and further developed according to the technological maturity levels in order to ultimately be integrated into Unisphere’s Platform NOVA.
The aim is to launch the finished product on the market as a minimum viable product (MVP) that can already be used by pilot customers.
Digital Twin
Digital Twin
In the SERENGETI project, the digital twin is being further developed. The current representation of the flight environment is based on a digital elevation model from Copernicus earth observation data. As part of SERENGETI, three additional data sources will be integrated in order to model the flight environment more accurately:
In the SERENGETI project, the digital twin is being further developed. The current representation of the flight environment is based on a digital elevation model from Copernicus earth observation data. As part of SERENGETI, three additional data sources will be integrated in order to model the flight environment more accurately:
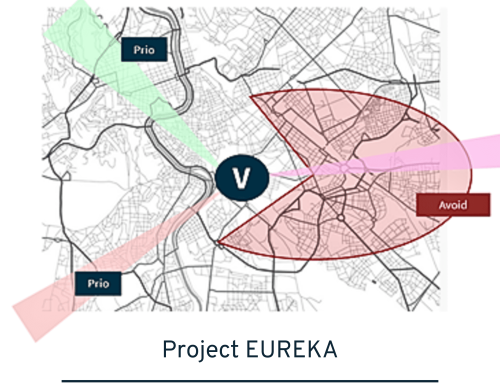
a) Digital obstacle database
a) Digital obstacle database
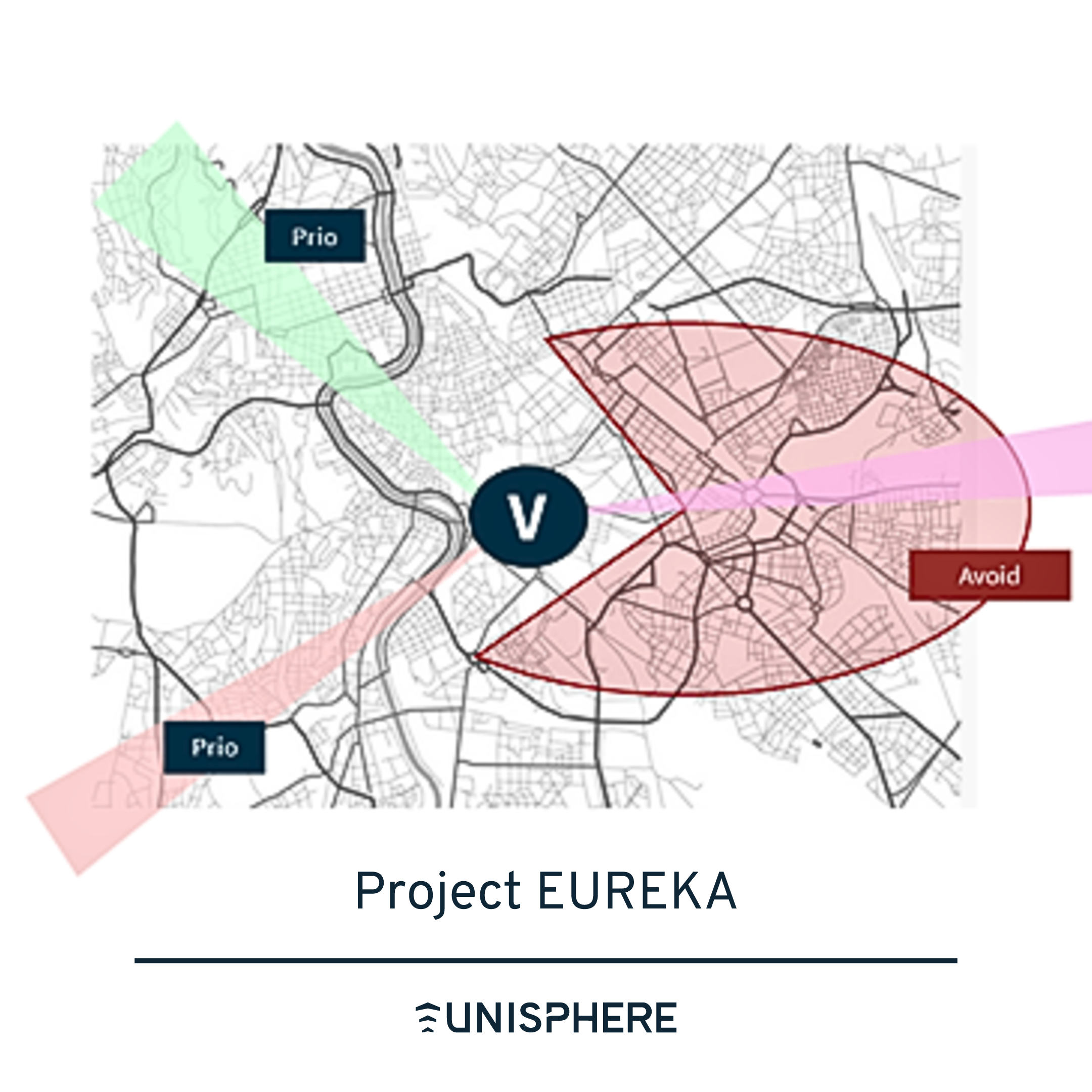
Drones operate in low airspaces at heights between around 20 and 150 meters. As mentioned above, in urban areas it is crucial to have precise information about the buildings along the flight route in order to avoid collisions and to take into account the influence of buildings on weather effects. The OpenStreetMap (OSM) software platform collects and structures freely usable geodata.
The aim is to consider 3D obstacle data when planning drone flight routes to ensure that there is sufficient lateral and vertical space between the flight path and the buildings.
Drones operate in low airspaces at heights between around 20 and 150 meters. As mentioned above, in urban areas it is crucial to have precise information about the buildings along the flight route in order to avoid collisions and to take into account the influence of buildings on weather effects. The OpenStreetMap (OSM) software platform collects and structures freely usable geodata.
The aim is to consider 3D obstacle data when planning drone flight routes to ensure that there is sufficient lateral and vertical space between the flight path and the buildings.

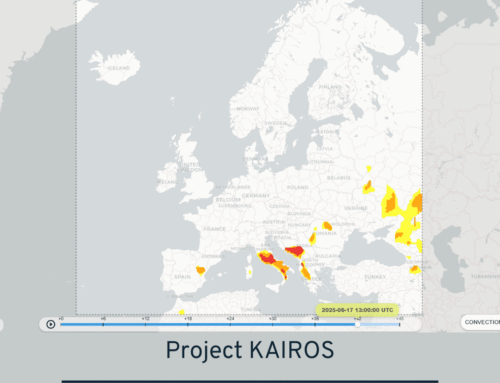
b) Three-dimensional connectivity prediction, airspace and air traffic data
b) Three-dimensional connectivity prediction, airspace and air traffic data
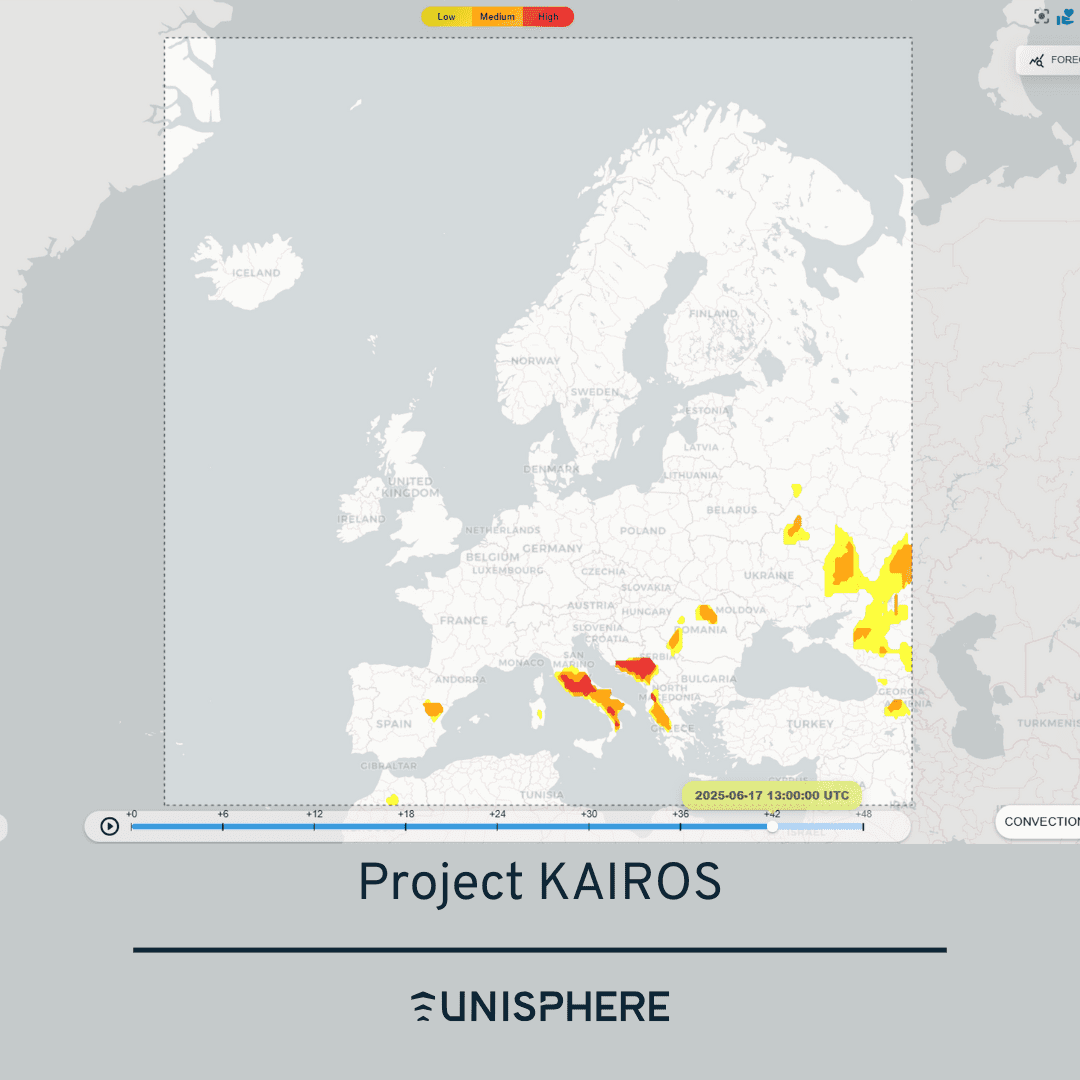
For an improved representation of the flight environment, a three-dimensional connectivity prediction and the integration of airspace and air traffic data are added.
The aim is to supplement the simulated aircraft position with additional information to create a comprehensive data set. This enables a realistic simulation and provides all the necessary information for the automatic feasibility assessment.
This includes ensuring a reliable data link to the drone controller, possibly real-time transmission of camera data and measurement sensors, and checking the flight route for potential other air traffic.
For an improved representation of the flight environment, a three-dimensional connectivity prediction and the integration of airspace and air traffic data are added.
The aim is to supplement the simulated aircraft position with additional information to create a comprehensive data set. This enables a realistic simulation and provides all the necessary information for the automatic feasibility assessment.
This includes ensuring a reliable data link to the drone controller, possibly real-time transmission of camera data and measurement sensors, and checking the flight route for potential other air traffic.
c) Flight performance model for fixed-wing drones
c) Flight performance model for fixed-wing drones
Multicopters and fixed-wing drones differ fundamentally in the way they generate lift. Multicopters use vertically arranged rotors similar to helicopters to generate lift. Fixed-wing drones, on the other hand, are like conventional airplanes and generate lift by using a fixed wing, which is propelled in forward flight.
Since fixed-wing drones are conceptually superior, especially for long-distance flights or with heavy loads, a second generic flight performance model for fixed-wing drones is being developed as part of this project.
Multicopters and fixed-wing drones differ fundamentally in the way they generate lift. Multicopters use vertically arranged rotors similar to helicopters to generate lift. Fixed-wing drones, on the other hand, are like conventional airplanes and generate lift by using a fixed wing, which is propelled in forward flight.
Since fixed-wing drones are conceptually superior, especially for long-distance flights or with heavy loads, a second generic flight performance model for fixed-wing drones is being developed as part of this project.
Smart Data Lake & Automatic Improvement of New Digital Twin Functions
Smart Data Lake & Automatic Improvement of New Digital Twin Functions
A key element for the automated improvement of the digital twin is the so-called “data lake”. This is basically a central storage facility in which any amount of data can be stored and analyzed (for example, the drone’s flight data, data from weather stations or pilot interventions).
Intelligent analysis tools in the data lake make it possible to transfer the pilots’ knowledge into software. This in turn leads to faster decision-making during flight planning and enables automatic improvement of the digital twin itself.
The risk index is a type of safety assessment that reflects the complex knowledge of pilots and provides an additional level of safety when assessing drone flight plans. The risk index enables the real-time identification of foreseeable hazards during the flight planning phase without the need for a time-consuming assessment of single aspects.
To automatically improve the digital twin, machine learning (ML) methods are developed to detect differences between the digital twin and the actual flight data. The results of the ML analyses are fed back into the simulator as adjustments. Machine learning can detect systematic errors, such as deviations from the planned flight path in the 4D flight path simulations or positive deviations in wind speed in the weather forecasts.
A key element for the automated improvement of the digital twin is the so-called “data lake”. This is basically a central storage facility in which any amount of data can be stored and analyzed (for example, the drone’s flight data, data from weather stations or pilot interventions).
Intelligent analysis tools in the data lake make it possible to transfer the pilots’ knowledge into software. This in turn leads to faster decision-making during flight planning and enables automatic improvement of the digital twin itself.
The risk index is a type of safety assessment that reflects the complex knowledge of pilots and provides an additional level of safety when assessing drone flight plans. The risk index enables the real-time identification of foreseeable hazards during the flight planning phase without the need for a time-consuming assessment of single aspects.
To automatically improve the digital twin, machine learning (ML) methods are developed to detect differences between the digital twin and the actual flight data.
The results of the ML analyses are fed back into the simulator as adjustments. Machine learning can detect systematic errors, such as deviations from the planned flight path in the 4D flight path simulations or positive deviations in wind speed in the weather forecasts.
Project goals:
Project goals:
– Development of a software architectural concept for the Smart Data Lake in the Unisphere Amazon Web Service Cloud environment
– Concept development for an automatic risk index
– Concept for the application of machine learning from the Amazon Web Service Tool Sets
– Prototypical integration into the Unisphere software environment
– Effort and cost estimation for a complete integration
– Development of a software architectural concept for the Smart Data Lake in the Unisphere Amazon Web Service Cloud environment
– Concept development for an automatic risk index
– Concept for the application of machine learning from the Amazon Web Service Tool Sets
– Prototypical integration into the Unisphere software environment
– Effort and cost estimation for a complete integration
Validation of New Digital Twin Functions in Flight Simulation
Validation of New Digital Twin Functions in Flight Simulation
An important goal of the project is the systematic validation of the new digital twin functions through flight tests. Unisphere is planning a special flight test campaign with common drone types in order to create a consistent data basis for the validation.
During the flight tests, Unisphere will become the drone operator itself for the first time in order to gain a deeper understanding of the challenges and needs in this role. This enables customer-oriented improvement and further advancement of software development.
An approved test flight route beyond visual range is established in Constance. Unisphere utilizes the existing expertise in flight testing and risk assessment for drones as well as the successful cooperation with the state aviation authority since 2020.
An important goal of the project is the systematic validation of the new digital twin functions through flight tests. Unisphere is planning a special flight test campaign with common drone types in order to create a consistent data basis for the validation.
During the flight tests, Unisphere will become the drone operator itself for the first time in order to gain a deeper understanding of the challenges and needs in this role. This enables customer-oriented improvement and further advancement of software development.
An approved test flight route beyond visual range is established in Constance. Unisphere utilizes the existing expertise in flight testing and risk assessment for drones as well as the successful cooperation with the state aviation authority since 2020.

In summary, SERENGETI is building on the success of SIMBA while planning to integrate further functions into Unisphere’s NOVA platform. The validation of the digital twin through flight tests and the first-time role as a drone operator underline Unisphere’s practical approach.
The planned certification by the European Aviation Safety Agency (EASA) emphasizes the high standards of quality and safety. SERENGETI marks a significant advance in drone development and the efficient and safe use of drones in a variety of applications.
In summary, SERENGETI is building on the success of SIMBA while planning to integrate further functions into Unisphere’s NOVA platform. The validation of the digital twin through flight tests and the first-time role as a drone operator underline Unisphere’s practical approach.
The planned certification by the European Aviation Safety Agency (EASA) emphasizes the high standards of quality and safety. SERENGETI marks a significant advance in drone development and the efficient and safe use of drones in a variety of applications.

{kind=link}
{kind=link}
{kind=link}
{kind=link}